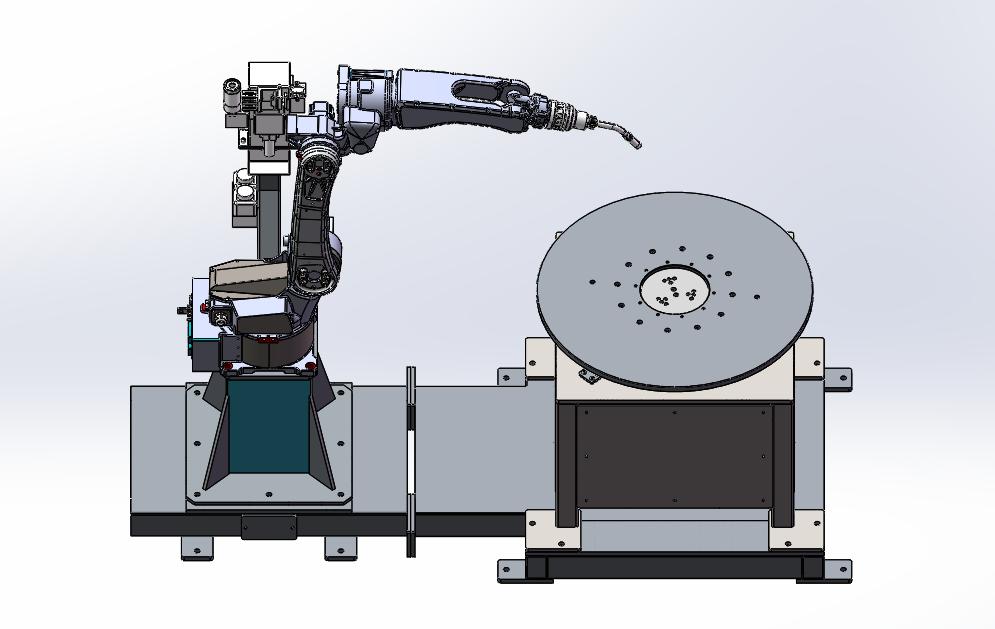
Lijneya xebatê ya robotîk a welding a aluminiumê ya polayê zengarnegir a 6 eksenî






Taybetî
1. Sêwirana kabloya çêkirî ya robotê dihêle ku robot bêyî destwerdanê tevbigere û nexşeya stasyona kar paqij û rêkûpêk e.
2. Kabîneya kontrola robot dikare heta 11 axên kontrol bike, ji dûrxistina tevlihev a PLC û dagirkirina cîh dûr bikeve
3. Robota JHY û pozîsyoner dikarin werin senkronîzekirin, û robot dikare di heman demê de dema ku pozîsyoner dizivire bi hev re weld bike, ev stasyona kar bi taybetî ji bo weldkirina dorhêl guncan dike.
4. Cûrbecûr alavên alîkar hene, wek sensorên lazer, perdeyên ronahiyê yên ewlehiyê û têlên ewlehiyê.
5. Sîstema kontrolê çend pakêtên pêvajoya kaynakirinê dihewîne, ku dihêle ku modên kaynakirinê yên cûda ji bo perçeyên kar ên cûda werin bikar anîn.
Parametreya teknîkî ya pozîsyoner
| Cins | JHY4030D-080 |
| Voltaja Têketinê ya Nirxandî | Yek-qonax 220V, 50/60HZ |
| Kalîteya Îzolekirina Motorê | F |
| Maseya Kar | Dirêjahî 800mm (dikare were xweşkirin) |
| Pîvan | Nêzîkî 400 kg |
| Barkêşiya herî zêde | Barkêşiya Aksiyal ≤300kg / ≤500kg / ≤1000kg (>1000kg dikare were xweş kirin) |
| Dubarekirin | ±0.1mm |
| Cihê Rawestandinê | Her helwestek |
Pêkhateyên Stasyona Kar a Robotê
1. Robota qayîmkirinê:
Cure: Robota qeymaqê ya MIG-BR-1510A, BR-1810A, BR-2010A
Robota qaymaqê ya TIG: BR-1510B, BR-1920B
Robota lazerê ya weldingê: BR-1410G, BR-1610G
2.Pozîsyoner
Model: JHY4030D-080
Tîpa: Pozîsyonerê zivirî yê horizontî yê 1-axê
3. Çavkaniya hêza weldingê
Cure: Çavkaniya hêza weldingê 350A/500A
4. Çekê qayimkirinê
Cure: çekê hewa-sar, çekê av-sar, çekê push-pull
5. Qereqola paqijkirina meşaleyê:
Model: SC220A
Tîp: Paqijkera meşaleya weldingê ya pneumatîk a otomatîk
Amûrên din ên îstasyona kar a robotîk
1. Robotên ku rêhesinê diguhezînin
Model: JHY6050A-030
2. Sensora lazerê (vebijarkî)
Fonksiyon: şopandina weld, pozîsyonkirin.
3. Perdeya ronahiyê ya ewlehiyê (vebijarkî)
Dûrahiya parastinê: 0.1-2m, 0.1-5m; bilindahiya parastinê: 140-3180mm
4. Çîta ewlehiyê (vebijarkî)
5. Kabîneya PLC (vebijarkî)
Kategoriyên berheman
-

Îstasyona Welding Robotîk a Mig Tig bi Welding 6 Axis ...
-

CE sertîfîkaya 6 eksen milê polayê zengarnegir Puls ...
-

Robota weldingê ya bi kalîte bilind ji bo weldingkirina mobîlyayan tê bikaranîn
-

Robota weldingê ya lazerê bi gihîştina 1400 mm
-

6 Axis robotên welding ên aluminiumê yên polayê zengarnegir ...
-

Pozîsyona welding a kêmkerê RV-ya rastbûna bilind